自動ロボットの紹介
自動ロボットは、手動ロボットを協力して競技の後半の課題をクリアするためのロボットです。
各関節にモーターをつけた人型ロボットで、高い技術が組み込まれている点が特徴です。
(写真をクリックすると拡大します)
複雑な電気制御を支えるデザイン
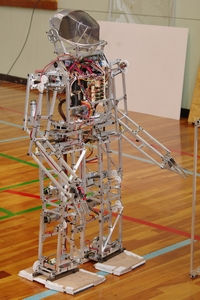
Spicaの自動ロボットの最大の特徴は、各関節にモーターを取り付け、
合計12個のモーターで滑らかな歩行を行う2本の足です。
デザイン面としては、「人型のデザインにこだわりつつ、外側のフレームをなくす」というコンセプトの下、耐久性の高いロボットとなっています。
複雑になる電気制御側の負担を少しでもなくすため、機構側での不安を感じさせないよう、信頼性の高い設計を行いました。
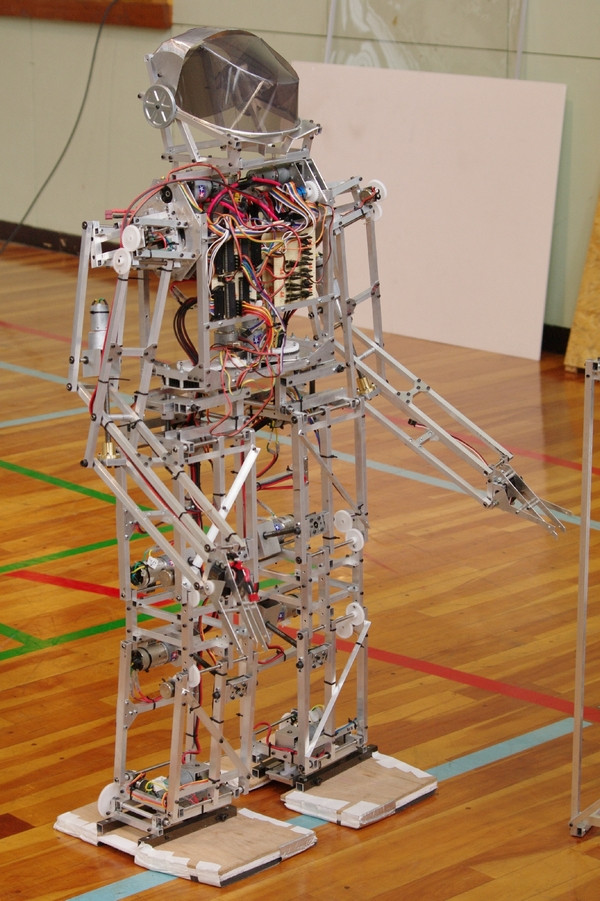
実際に工作機械に採用されている
台形ねじとボールねじを足に使い、モーターへの負荷を軽減しました。
また、足裏に衝撃を吸収するためのダンパーを取り付け、ロボットがバランスを崩すのを防ぐことができるようになっています。
15個のモーターを使ってロボットの動きを完全にインプット

Spicaの自動ロボットには、足の部分に12個、腕に3個、合計15個のモーターが搭載されています。
電子工作用のマイクロコンピュータを6個搭載して、ロボットの複雑な動作を可能にしています。
各モーターにはどれだけ回転したかを読み取るためのセンサーが取り付けられており、センサーの入力を読み取りながら各モーターに動作の命令を出します。
たとえば、スターステージへの15センチの段差を上る動作では、
① 片足を出す
② もう片方の足を上げる
③ 段差の上に脚を滑らせるように置く
④ 重心を前にもっていく
⑤ 体を持ち上げる
という動作を各モーターに伝えています。
この動作は計算などで入力したデータだとうまくいかず、改良や微調整を繰り返し、やっと見つけた方法です。
地区大会では当日までこの微調整作業を行っていました。
「Spica」紹介トップページへ戻る
 Spicaの自動ロボットの最大の特徴は、各関節にモーターを取り付け、合計12個のモーターで滑らかな歩行を行う2本の足です。
Spicaの自動ロボットの最大の特徴は、各関節にモーターを取り付け、合計12個のモーターで滑らかな歩行を行う2本の足です。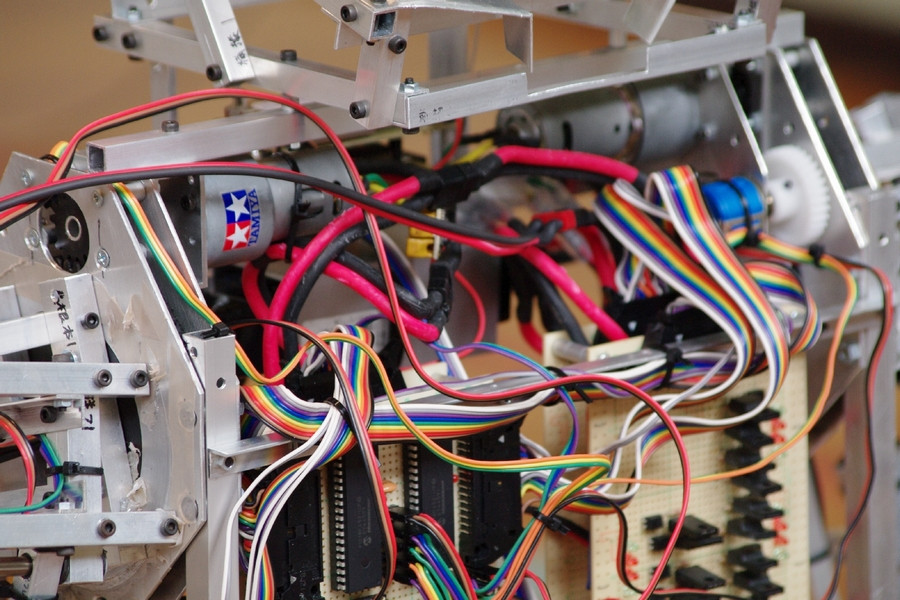 Spicaの自動ロボットには、足の部分に12個、腕に3個、合計15個のモーターが搭載されています。
Spicaの自動ロボットには、足の部分に12個、腕に3個、合計15個のモーターが搭載されています。