山田 実 研究業績 (2010年10月現在)
- 著書:
- システム制御工学 -基礎編-,寺嶋一彦編著,山田実他7名著,朝倉書店(2003)
- 学術論文:
- M. Yamada, M. Hashiura, Compression tests of carbon steel ball mould for casting,
International Journal of Cast Metals Research, Vol. 21, No. 1-4, pp.256-259(2008)
- Li Xu, M. Yamada, Z. Lin, O. Saito, Y. Anazawa, Further Improvements on Bose's 2D Stability
Test, International Journal of Control, Automation and Systems, Vol. 2, No. 3, pp. 319-332,
(2004)
- 山田 実,徐 粒,斉藤 制海,離散システム安定性判別法の代数演算化とその2次元システム安定性判別への応用,
計測自動制御学会論文集,Vol. 38, No. 1, 9/17 (2002)
- 山田 実,徐 粒,斉藤 制海,Practicalな条件に基づく2次元最適制御とその学習制御系への応用,
システム制御情報学会論文誌,第12巻,第12号,702/710 (1999)
- Minoru YAMADA, Li XU, Osami SAITO, 2D Model-Following Servo System,
Multidimensional Systems and Signal Processing, Vol. 10, No. 1, 71/91(1999)
- 山田 実,徐 粒,斉藤 制海,2次元モデル追従サーボシステムの設計,
計測自動制御学会論文集,Vol. 34,No. 2,p112/119(1998)
- 山田 実,徐 粒,斉藤 制海,2次元システムに対する状態観測器の設計とパラメトリゼーション,
計測自動制御学会論文集,Vol. 33,No. 8, 855/857 (1997)
- 徐 粒,山田 実,斉藤 制海,nDシステムのPracticalトラッキング問題,
計測自動制御学会論文集,Vol. 33,No. 9,897/904 (1997)
- 国際会議(査読付):
- M. Yamada, M. Hashiura, Compression Tests of Carbon Steel Ball Mold for Casting,
Proceedings of The 10th Asian Foundry Congress (AFC-10) (2008)
- Control of Particle Flow by Numerical Analysis using the Particle Element Method,
M. Yamada, Mituru Nagata, Proceedings of SICE'04 (2004)
- Iterative Learning Control of a robot manipulator using nD Practical tracking approach,
M. Yamada, Li Xu, O. Saito, Proceedings of MWSCAS2004 (2004)
- Experimental Results on Iterative control of Robot Manipulator by 2D Model-Following Servo Approach,
M. Yamada, Li Xu, O. Saito, Montreal, Proceedings of ICCA'03 (2003)
- Algebraic Algorithm for 2D Stability Test Based on a Lyapunov Equation,
M. Yamada, Li Xu, O. Saito, Indiana, Proceedings of MTNS 2002 (2002)
- Further Results on Bose's 2D Stability Test,
M. Yamada, Li Xu, O. Saito, Perpignan, Proceedings of MTNS 2000 (2000)
- Development of nD Control System Toolbox for Use with MATLAB,
M. Yamada, Li Xu, O. Saito, Proceedings of the 1999 IEEE International
Conference on Control Applications, 1543/1548, Hawaii (1999)
- 2D Model-Following Servo System and Its Applications to Linear Multipass Processes,
M. Yamada, Li Xu, O. Saito, Proceedings of IFAC'99 Vol D 241/246, Beijing (1999)
- Design of 2D Model-Following Servo Controller,
M. Yamada, Li Xu, O. Saito, St. Louis, MTNS'96 (1996)
- 2D Model-Following Servo System,
M. Yamada, Li Xu, O. Saito,
Proceedings of IFAC'96 Vol. D 291/296, San Francisco (1996)
- Practical Tracking Problem of nD Systems and Its Applications to
Iterative Control Systems,
Li Xu, M. Yamada, O. Saito and K. Abe,
Proceedings of 1st Asia Control Conference, III-447/450, Tokyo (1994)
- 研究会・学会発表:
- 高専祭専門展を通した機械工学科の紹介,
山田実,
第147回教育工学研究会・シンポジウム(2009)
- 炭素鋼球鋳型の繰り返し使用の影響,
山田実,橋浦正史,
日本鋳造工学会第155回全国公演大会(2009)
- 2次元システム制御による繰り返し注湯流量制御,
高橋伸伍,山田実,
日本鋳造工学会第155回全国公演大会(2009)
- 岐阜高専における科学技術リテラシー教育での活動,
山田実,
第146回教育工学研究会・シンポジウム(2008)
- 二輪自走式自転車の操舵による安定走行,
前田健二,山田実,
第49回自動制御連合講演会(2006)
- 炭素鋼球鋳型の強度に及ぼす加熱時間および球径の影響,
山田実,橋浦正史,
日本鋳造工学会第149回全国公演大会(2006)
- 画像解析による鋳物砂の形状定量化,
山田実,橋浦正史,
日本鋳造工学会第148回全国公演大会(2006)
- 専攻科における熱線流速計の実験,
山田実,河村隆雄,
第140回教育工学研究会・シンポジウム(2006)
- 鋳造における溶湯衝突後の凝固現象,
長屋宏,山田実,橋浦正史,
日本鋳造工学会第147回全国公演大会(2005)
- Iterative contorl of three link manipulator using 2D system control approach,
M. Yamada, Li Xu, O. Saito, Proceedings of SICE 2003 (2003)
- 旋回クレーンのセミオート制御,
伊藤史仁,山田実,
第45回自動制御連合講演会講演論文集(2002)
- 試行ごとに異なる目標値へのロボットアームの追従制御,
山田 実,徐 粒,斉藤制海,穴澤義久,須田 宏,
平成13年度 電気関係学会東北支部連合大会 ,229 (2001)
- 2Dモデル追従制御によるロボットアームの繰返し制御,
山田 実, 今井雅貴,徐 粒, 斎藤 制海
第40回SICE学術講演会予稿集, (2001)
- Lyapunov方程式に基づく代数演算化2D安定性判別法,
山田 実,
第14回回路とシステム軽井沢ワークショップ,77/82(2001)
- 近似代数の最適制御系設計への応用に関する研究,
西垣 佳臣,山田 実,
第43回自動制御連合講演会,37/38(2000)
- 2次元システム安定性判別の代数演算化,
山田 実, 徐 粒, 斎藤 制海,
第38回SICE学術講演会予稿集, 459/460 (1999)
- 2次元最適制御とその学習制御系への応用,
山田 実, 徐 粒, 斎藤 制海,
第20回Dynamical System Theoryシンポジウム資料,91/94(1997)
- 2次元システムの可検出性と状態観測器の設計,
山田 実, 徐 粒, 斎藤 制海,
第36回SICE学術講演会予稿集, 837/838 (1997)
- ローカル出力フィードバックによる2次元最適制御,
山田 実, 徐 粒, 斎藤 制海,
第35回SICE学術講演会予稿集, 103/104 (1996)
- 2次元モデル追従サーボシステムの設計,
山田 実, 徐 粒, 斎藤 制海,
第18回Dynamical System Theoryシンポジウム資料, 65/68 (1995)
- 出力フィードバックによる2次元最適トラッキング制御,
山田 実, 徐 粒, 斎藤 制海,
第34回SICE学術講演会予稿集, 353/354 (1995)
- 2次元線形システムの最適制御,
山田 実, 徐 粒, 斎藤 制海,
第17回Dynamical System Theoryシンポジウム資料, 379/382 (1994)
- その他:
- 機械工学実験Ⅱの実験装置開発,
山田実,
岐阜高専情報処理教育・研究報告第37号,19/22(2009)
- 高専祭専門展を通した機械工学科の紹介,
山田実,
教育工学論文集(2009)
- 岐阜高専における科学技術リテラシー教育での活動,
山田実,
教育工学論文集(2008)
- 画像解析による鋳物砂の粒度および形状解析,
山田実,橋浦正史,岐阜工業高等専門学校紀要,(2007)
- 専攻科における熱線流速計の実験,
山田実,河村隆雄,
教育工学論文集(2007)
- nD Practical トラッキング問題を用いたロボットアームの学習制御,
山田実,岐阜工業高等専門学校紀要,53/56 (2006)
- 粒子要素法を用いた粉体挙動解析と流量制御,
山田実,永田満,岐阜工業高等専門学校紀要,47/51 (2005)
- リサイクルタイルについての研究,
山田実,杉浦悟朗,岐阜工業高等専門学校紀要,21/26 (2003)
- 回転型倒立振子システムの製作,
山田 実,西垣佳臣,岐阜工業高等専門学校 技術教育・研究報告 第1号 (2001)
- 多リンクロボットアームの製作,
山田 実,今井雅貴,岐阜工業高等専門学校 技術教育・研究報告 第1号 (2001)
- ロボットアーム解析・設計Toolboxの開発,
山田 実,森 俊博,岐阜工業高等専門学校 情報処理教育・研究報告 第28号,9/12 (2001)
- MATLABにおける数式処理機能を用いた制御系ソフトの開発,
山田 実,第20回高等専門学校情報処理教育研究委員会発表会,216/219(2000)
- 数式処理ソフトを用いた制御系設計支援システムの開発,
日比野伸介,山田 実,岐阜工業高等専門学校 情報処理教育・研究報告 第27号,59/64 (2000)
- 2次元システムに対する安定性判別法の代数演算化,
山田 実,岐阜工業高等専門学校 情報処理教育・研究報告 第26号,25/30 (1999)
- 博士論文:
プラクティカルな条件に基づく多次元線形制御系設計に関する研究
- 修士論文:
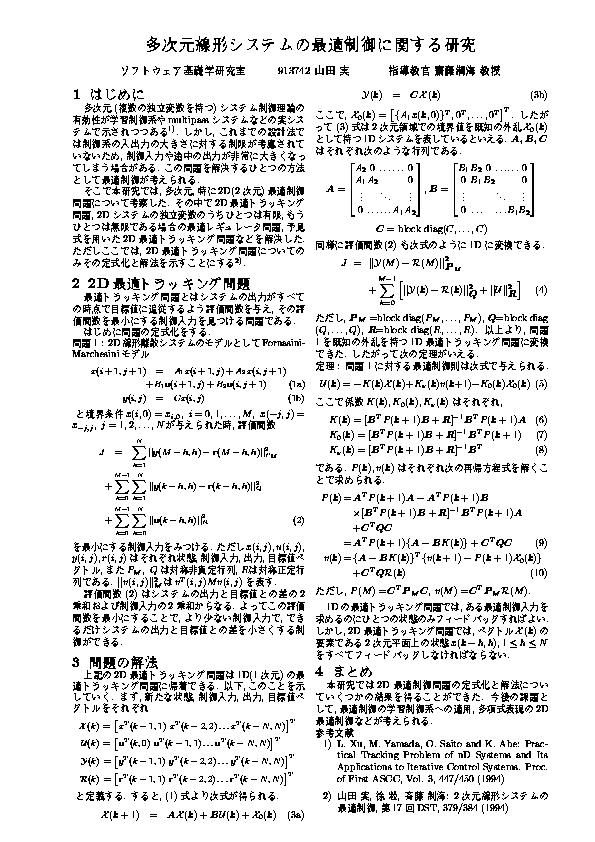
多次元線形システムの最適制御に関する研究
- 卒業論文:
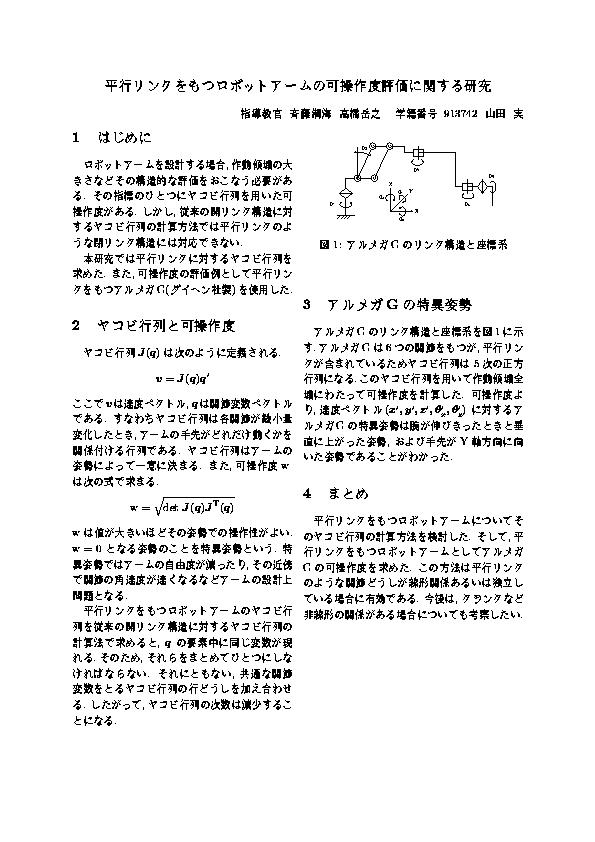
平行リンクをもつロボットアームの可操作度評価に関する研究
 戻る
戻る
{kind=link}
{kind=link}