
縄回し機構
安全装置
移動方法
鍵盤de操作
シロクマ
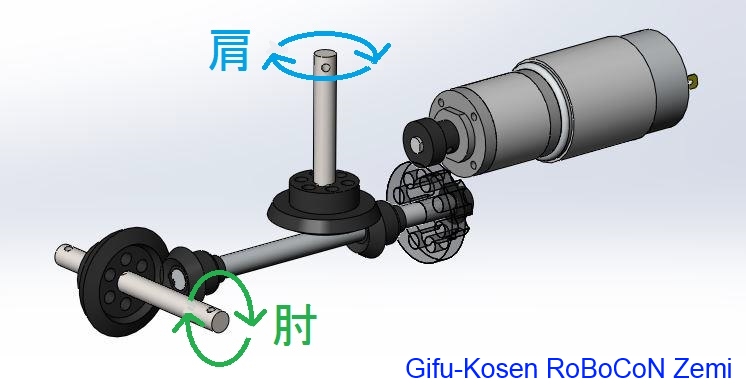
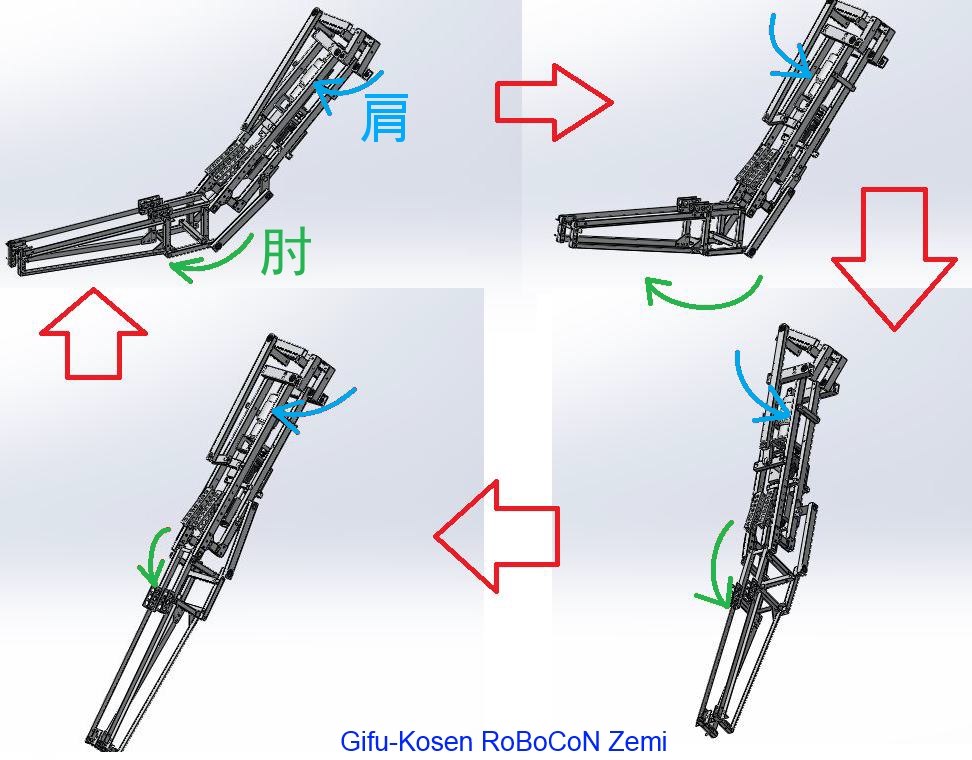
縄回しロボットの腕はまるで人間が縄を回しているように回すために肩と肘に分けて動かしています。
一つのモータをギヤによって二つの回転に分けることによって、電気的な制御をしなくても
モータを回転させるだけで肩と肘の同期がとれるようになっています。
上に戻る↑
強い負荷がかかるとマジックテープが外れるようになっています。

上に戻る↑
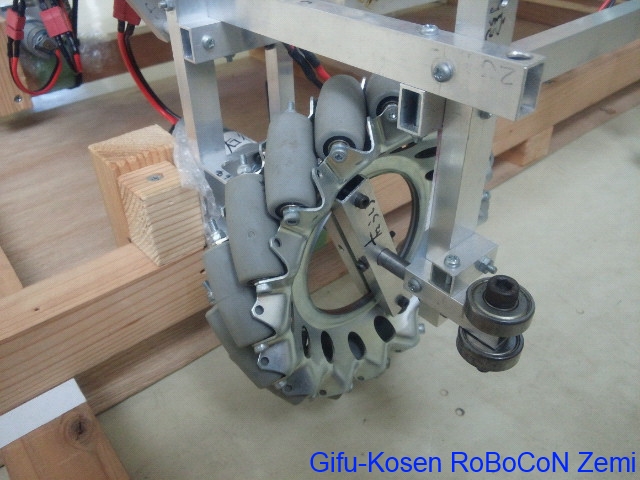
移動方法はメカナムホイールで動かしています。
メカナムホイールとは下の写真のように、タイヤにさらに小さなタイヤがたくさんついているタイヤです。
これを上手に制御すると前後左右斜めに平行移動できるうえにその場旋回もできます。
又、今回の競技では壁に沿って走行する必要があるので、壁と接する部分にベアリングが付いています。
上に戻る↑
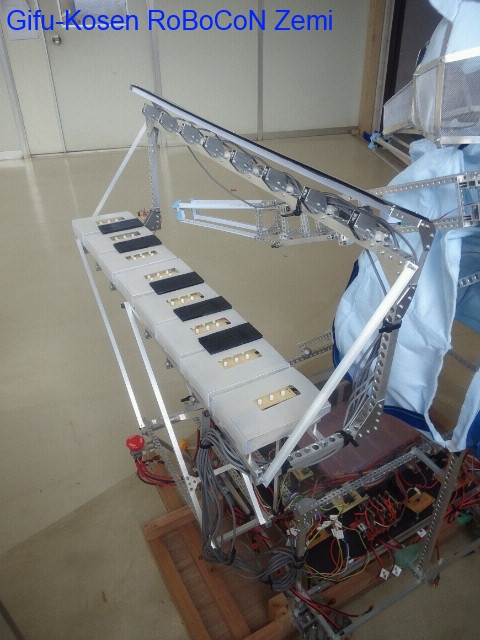
Gifu-Sonはシロクマとペンギンの氷上ライブを模しているので,ジャンパーロボットの操作はピアノを奏でるように鍵盤で行います。
鍵盤の上に手をかざして、上部についてるレーザーの光を遮ると、鍵盤が赤く光ってロボットを操作することが出来ます。
上に戻る↑
ジャンパーロボットは指揮棒を振っているシロクマとして作られました。
シロクマの外装はアルミフレームの上に金網と水色のフェルトを貼り付けて作られています。
背中にGifu-Sonオリジナルのギターを背負っているのもシロクマの特徴です。
また、縄を回さない方の手にも腕でを振り上げる機構があるので、両手で指揮棒を振る様子を見ることができます。


上に戻る↑
「GifuSon」紹介トップページへ戻る