自動ロボットの紹介
自動ロボットは、手動ロボットを協力して競技の後半の課題をクリアするためのロボットです。
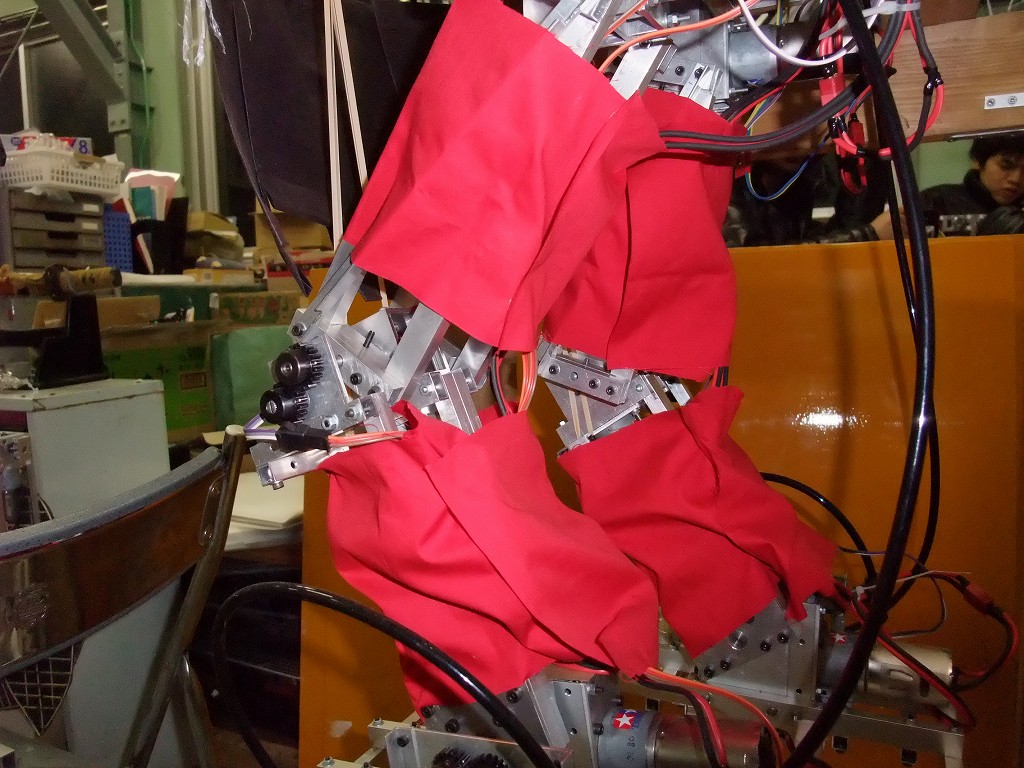
各関節にモーターをつけた人型ロボットで、高い技術が組み込まれている点が特徴です。
(写真をクリックすると拡大します)
体勢を整えるエアー・なめらかな歩行をするサーボ制御
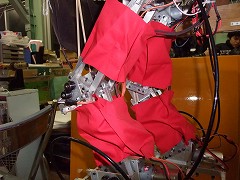
自動ロボット、武者ぼぼの特徴は
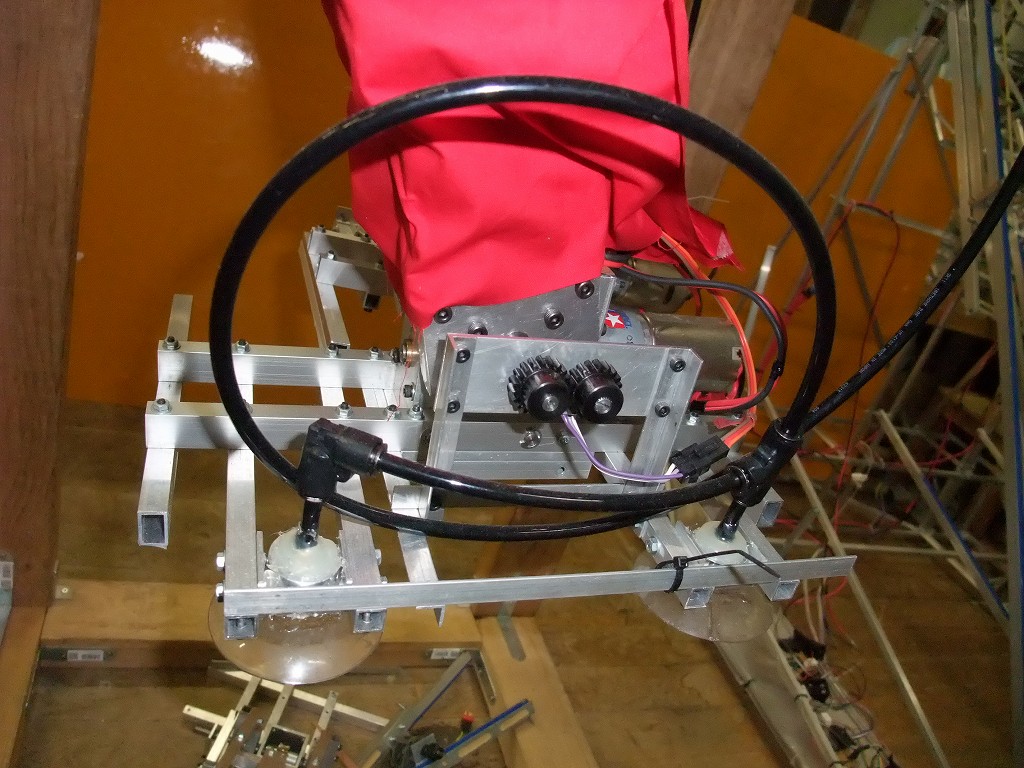
足の各関節にモーターを付け、それらで滑らかな歩行を行うことです。
重心を移動させて片足立ちになり、もう一方の足を前に出して前進します。この歩行方法を静歩行といいます。重心の移動は体勢の変化だけでやっているので、
よりヒトの歩行に近い歩行ができました。
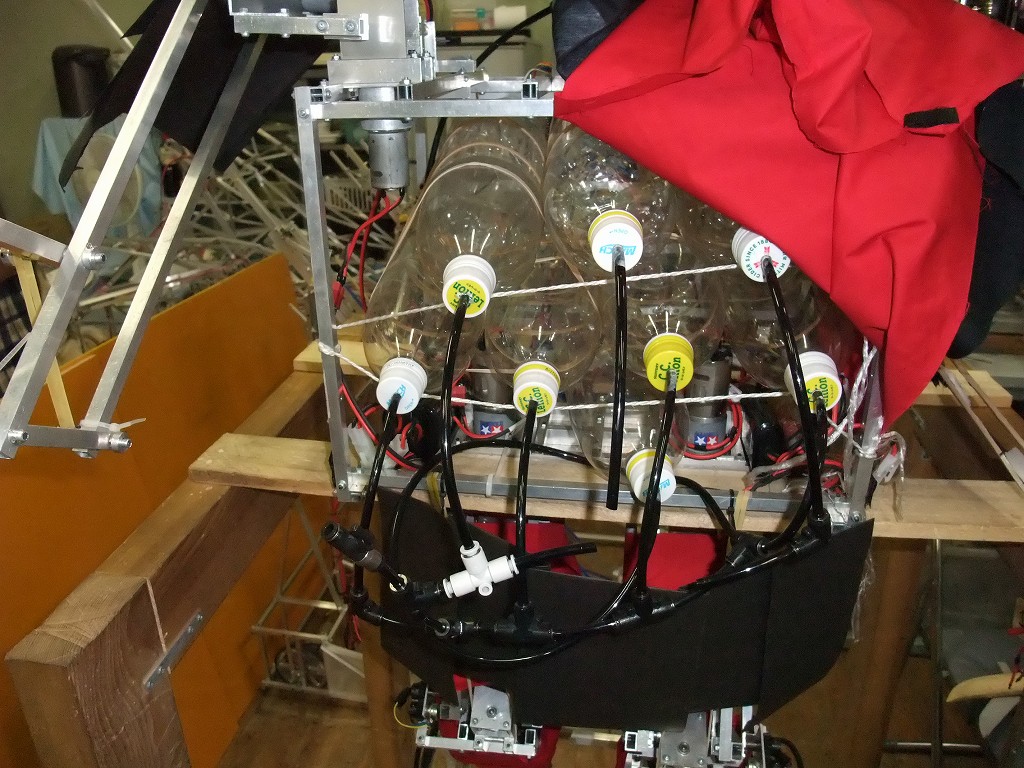
また、歩行を安定させるため、片足立ちになるときに
足の裏の吸盤で地面を吸いつけ、体勢を整えます。
これは圧縮空気を使った
真空発生器によるもので、真ん中のペットボトルに圧縮空気が詰まっています。


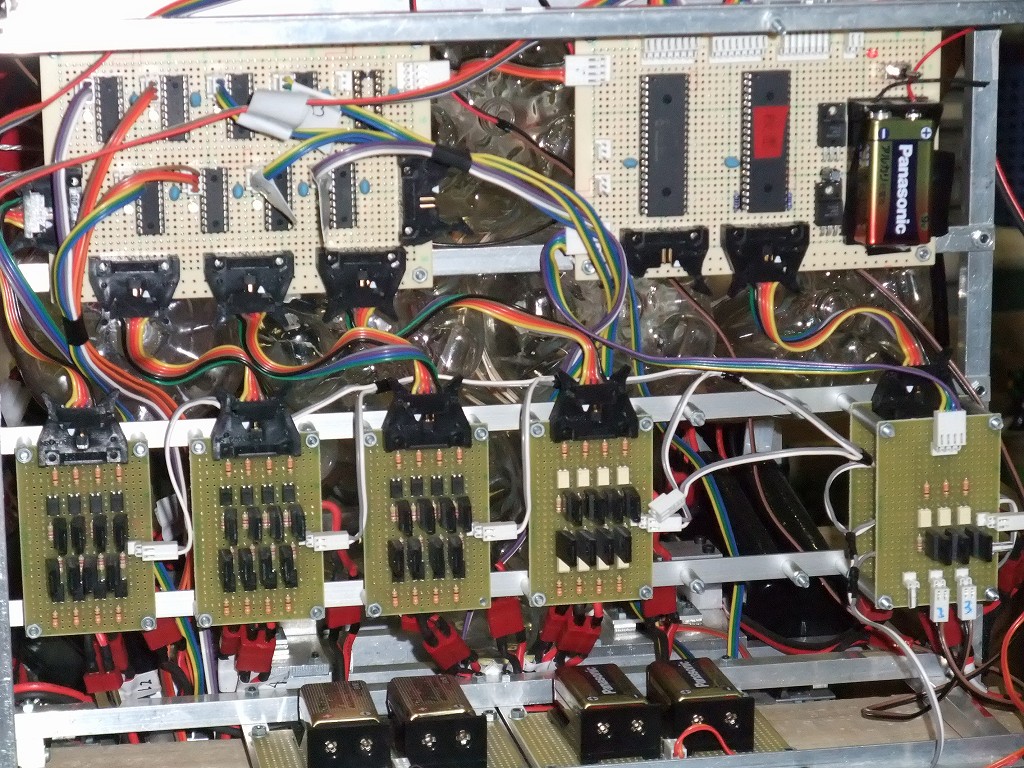
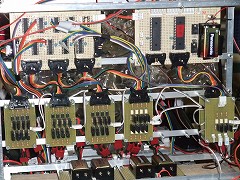
次はモーター制御関連です。
写真にあるとおり
多くのマイクロコンピューターを使って足の角度、位置、速度などを制御しています。
これらを使って行っているのが歩行につかうたくさんのモーターの制御です。
モーターの各部分には
ポテンションメーターが付いています。
ポテンションメーターはそのまわり具合のデータを手に入れるためのセンサーです。
そしてその値、単位時間当たりの変化量などから、足の現在の角度、速度を出し、
それを使って現在の
足の位置、体の重心を調べています。
そのデータを見ながら足が決まった位置を通過しながら動くように制御しています。
歩行のときの足の位置はなかなか計算したデータでは上手くいかず試行錯誤して出したものです。
「踊る!大争奪戦」紹介トップページへ戻る