2足歩行ロボットの紹介
今回の2足歩行ロボットは人を乗せた乗り物との連結、連結状態での移動、鍵かけと、様々な機能を備えています。
人を乗り物に乗せたまま行う移動のパワーとスピード、高所にあるリングに鍵を入れる精密さが競技の見どころです。
(写真をクリックすると拡大します)
〜ロボット〜
激走・鍵かけを一つの機構でこなす
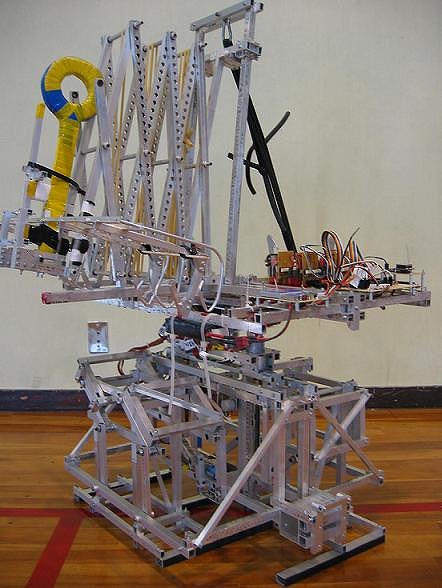
Ray × Runの最も大きな特徴は上半身にある
パンタグラフ機構という機構です。
この機構はマジックハンドのような動きをする機構で、各所に張られているゴムの力を使うことにより乗り物の壁を押し、
約10秒で激走ゾーンを駆け抜けます。
また、伸びきったパンタグラフ機構を立てることにより
ダイナミックな動きで鍵かけも行い、スピードを落とさずにそのままゴールすることができます。
パンタグラフを伸ばす、立てることを
1つのモーターで制御を行っているのも特徴で、操縦者や電気制御の負担を減らすことができました。
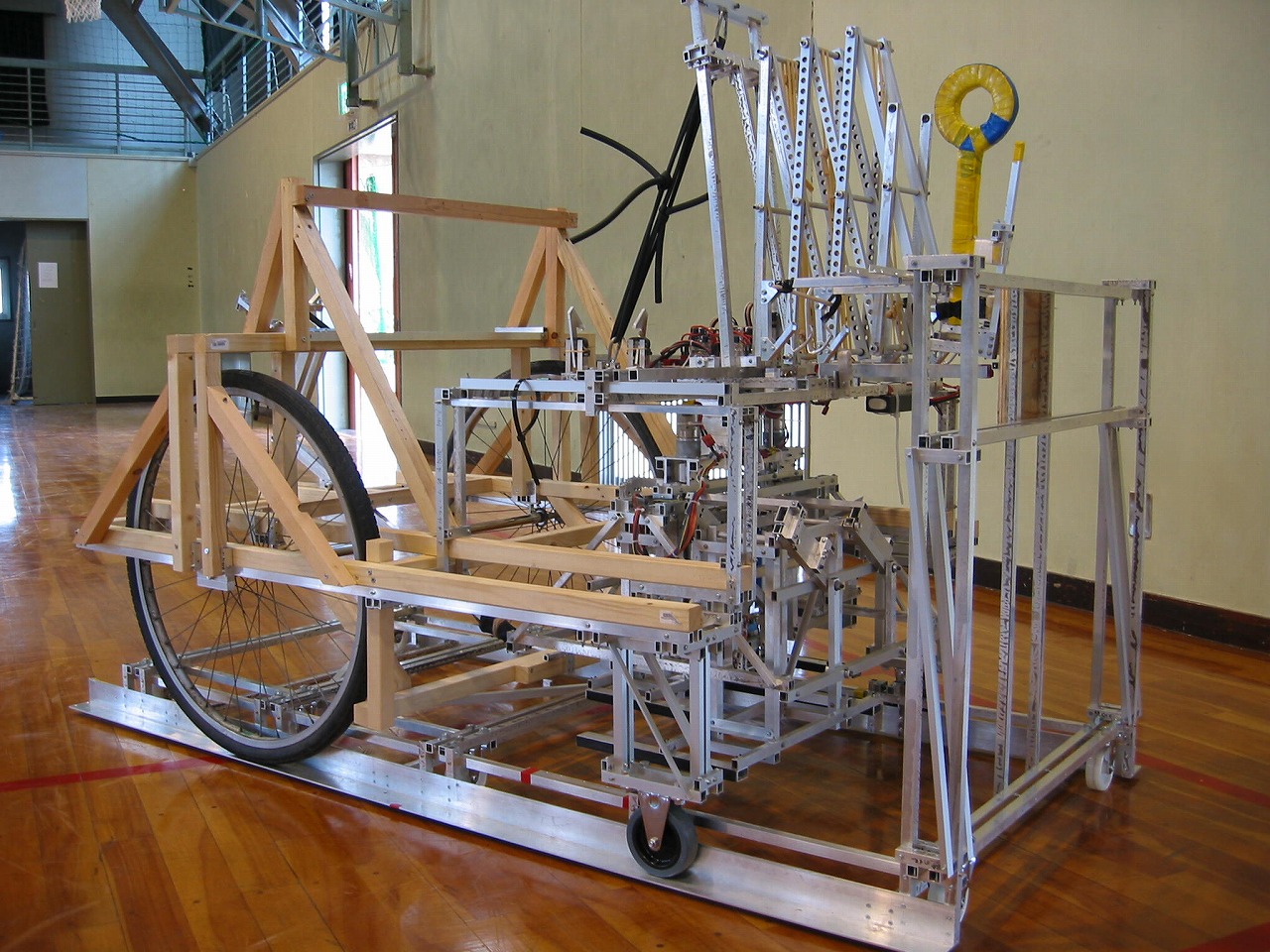
乗り物に乗った状態で行う左右移動
Ray × Runは連結作業後、足の機構についている昇降機構によって
足の高さを調整することで乗り物に連結した状態でも歩行をすることができます。
昇降機構は2つのモーターを使って回しており、
各モーターへの出力を電気的に調整し同じ速度で回すことで昇降を行います。
足を浮かせた状態で上半身と下半身の繋ぎ目にある旋回機構を使うことにより
足の機構自体を回し、横への移動をすることができます。
連結状態では、乗り物についているキャスターやタイヤに沿って進むことで直進性を高め、
確実に移動したい位置に進むことができます。
〜乗り物〜
分離する・高い直進性をもつ乗り物
Ray × Runの乗り物は
レール部分とその上にある
乗り物部分の2つでできています。
激走ゾーンでは乗り物に乗っているロボットがレールの壁を押すことにより2つが
分離し、激走ゾーンを力強く駆け抜けます。
前項にも書いたとおり、乗り物にはキャスターとタイヤが付いており、それぞれレール、乗り物に付いています。
足の向きを変え、キャスターやタイヤに沿って歩くことで
高い直進性を得ることができました。
「Ray × Run」紹介トップページへ戻る