フコダイン
岐阜高専RoBoCoNゼミ
- ロボコンの今!
Menu
→[岐阜高専トップページ]
このサイトは、
Internet Explorer 7,8
Firefox 3
Opera 10
Safari 4
で動作確認を行っています。
画面サイズは
XGA(1024x768)以上
を考慮しています。
CSS
を使用していますので、
無効にされている方は
有効にして下さい。
〜お願い〜
ブラウザやOS環境の違いでコンテンツが正しく表示されなかった時は、 連絡先よりその都度を教えていただけると幸いです。
岐阜高専ロボコンチームの最新情報をお届けする
特集ページ誕生!!
初めての方は
「ロボコンの今!とは」
をご覧ください。
バックナンバーは
こちら
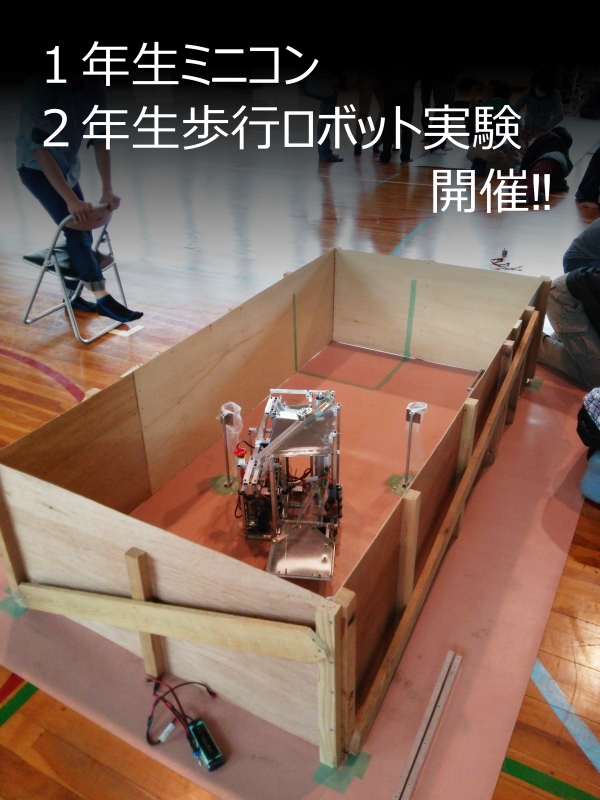
2014年4月号
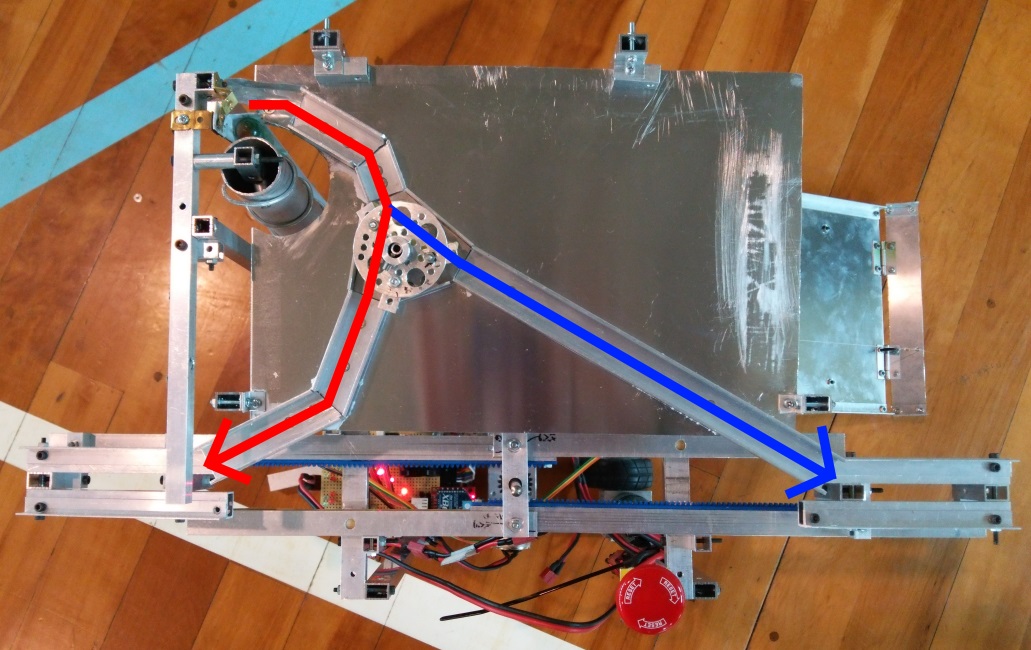
オフシーズンの集大成
2014年2月号
には2年生と1年生のオフシーズンでの活動を紹介しました。
そして新しい年度が始まる直前の3月31日にその発表がありました。
ここからはその詳しい模様をお伝えします。