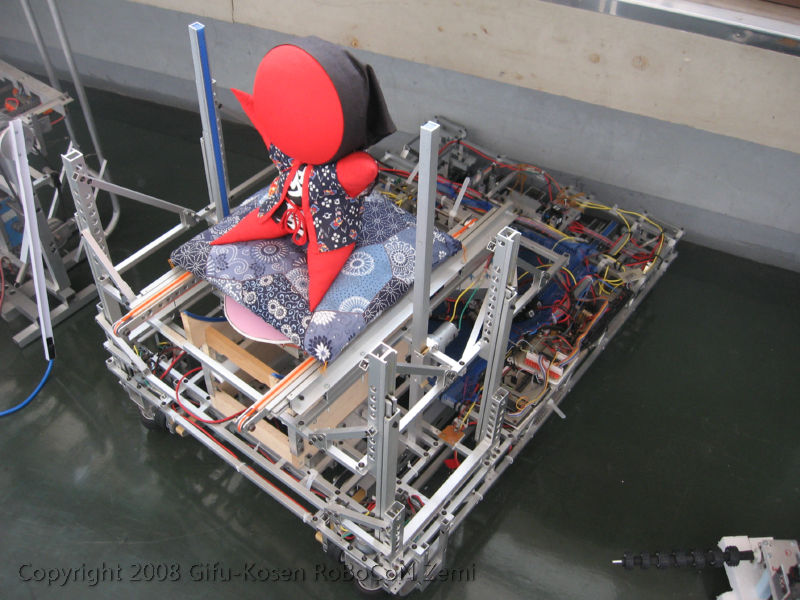
手動ロボットの紹介
手動ロボットは数々の足回りとオブジェを落とさないための免震機構が特徴です。
(写真をクリックすると拡大します。)
3種類の足回り

手動ロボットの足回りは3種類あります。1つはお堀を渡るときに使われる
「わたる君」と名づけられたクローラーです。
このクローラーを使って、素早くお堀を渡ることができます。

もう1つはシーソーのときに使われるロボット内部に横向きに設置されているタイヤです。このタイヤでしっかりとロボットとシーソーを固定し、モノレールのようなかたちでシーソーを乗り越えます。
最後は通常走行に使われるタイヤで、
「すすむ君」と名づけられました。このタイヤを使ってスラロームを簡単に抜けることができます。
さるぼぼを落とさないために・・・

さるぼぼを落とさないための工夫として
パッシブ型3次元免震振り子機構と呼ばれる振り子の台があります。
シーソーで車体が傾いてもさるぼぼを乗せているトレイは必ず水平になるようになっています。
また、地区大会を終えてからスラロームで余計な揺れができるのを防ぐために、この機構を止めるストッパーをつけました。
「SaLuVoBO++」紹介トップページへ戻る
 手動ロボットの足回りは3種類あります。1つはお堀を渡るときに使われる「わたる君」と名づけられたクローラーです。
手動ロボットの足回りは3種類あります。1つはお堀を渡るときに使われる「わたる君」と名づけられたクローラーです。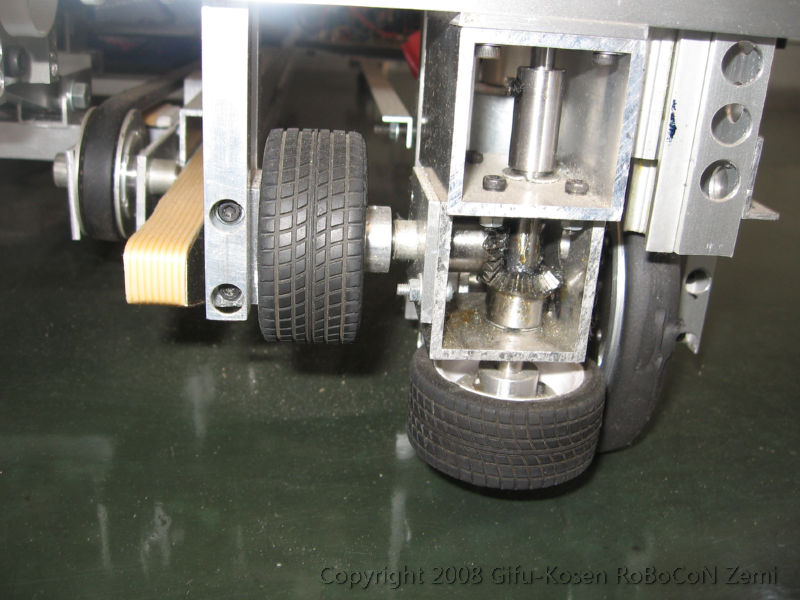 もう1つはシーソーのときに使われるロボット内部に横向きに設置されているタイヤです。このタイヤでしっかりとロボットとシーソーを固定し、モノレールのようなかたちでシーソーを乗り越えます。
もう1つはシーソーのときに使われるロボット内部に横向きに設置されているタイヤです。このタイヤでしっかりとロボットとシーソーを固定し、モノレールのようなかたちでシーソーを乗り越えます。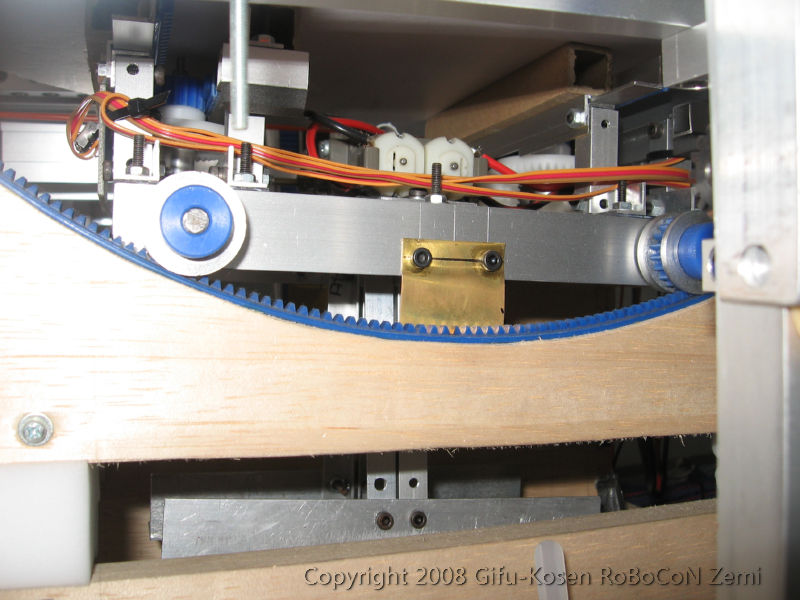 さるぼぼを落とさないための工夫としてパッシブ型3次元免震振り子機構と呼ばれる振り子の台があります。
さるぼぼを落とさないための工夫としてパッシブ型3次元免震振り子機構と呼ばれる振り子の台があります。